Debugging and fixing a slow arduino serial connection
May 07, 2023
Tags: pottery internet of things automation arduinoMy Smart Kiln runs of a Raspberry pi (or something like that) and an arduino. The arduino is in charge of reading data from all sensors, running the PID loop and switching the SSR (Solid State Relay) that controls the heater element. It also has a serial interface to communicate. It can be used to tune PID params and set the setpoint as well as read data back. This is used to feed data into Grafana. The Pi communicates with the arduino to retrieve the sensor readings for multiple temperatures, the pid params, setpoints, state and anything else I might think worth logging. It also runs a separate control loop that reads file with a firing schedule and communicates with the arduino to make it follow the schedule.
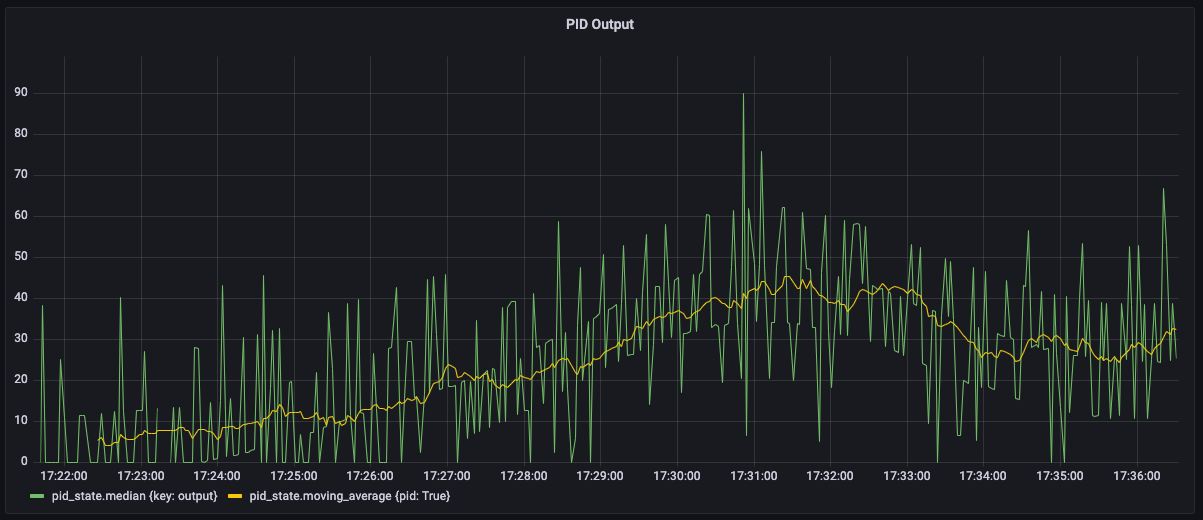
The temperature inside the kiln has a lot of "inertia", ie it can't change very fast, so we don't need a pid loop running at a super high frequency. A few hertz should be more than enough. The first version, which only had the data logger, ran at a neat 1hz without me doing anything in particular. I remember going back and being like "I don't recall adding a 1 second delay in the loop" but I didn't think much of it. When I added the firing schedule feature, running from a second loop, I noticed that things slowed down to a bit over 2 seconds per iteration. Later I added a third monitoring loop to make sure things weren't on fire and it got down to 3 seconds per iteration. The pid loop was now running way slower than I expected, and it clearly ran slower the more I used the serial port. While the oven can operate fine at 0.3 hertz, the nerd/engineer in me couldn't sleep at night knowing that it should be running several times per second. I expected to have to make it slow down. Not to have to debug it to run faster. The main issue with the inconsistent and slow loop times, is that the PID output changes depending on how long the last interaction took. In the image below, the green line is the raw output and the yellow one is a moving average. We can see 3 clear bands in the output, caused by the 1, 2 and 3 second delays between iterations.
First thing was to check the obvious: Hidden (or not so hidden) delays around
the code. There was none except for some bitbanging in the order 1 or 2 digit
microseconds delays. Next I confirmed that using the port less would cause the
loop to run faster, and it did. Serial was running at a whopping 9600 baud
rate. The data logger would send a READ_TEMPS command and receive back
something like "60000,1000.10,20.00,30.00,40.00" (a counter and readings from
multiple sensors). That is 42 chars in total, including the return character.
Even at a 9600 baud, it should be able to run at 100s of hertz. This wasn't the
issue, but I bumped the baud to 115200 just to make sure and nothing changed.
While working on Aratu, my hexapode robot, I faced the same
problem. There I needed a much faster iteration, at least 100 hertz. The setup
between the two was completely different. Aratu used a raspberry pi 3 and a
Teensy 4.1 while the smart kiln uses an orange pi and an arduino mega. The only
common thing between the two is the arduino core library, which handles serial.
Looking at the documentation for
Serial.readString
we have The function terminates if it times out. Aha! It seems to have a
timeout for when there is nothing to read. The default timeout is 1 second,
which explains the neat 1 second increments in the iteration times. Using
Serial.setTimeout
to set the timeout to 10 ms swiftly solved the issue.
The code starts by first reading data from the serial port, parsing it and returning the outputs requested. If there isn't data to read, it just waits until it times out. We know that the messages to be read are quite small, and failing to parse it every now and then won't have any catastrophic effects, so it should be fine having a 10 ms timeout.
With this change, the smart kiln pid loop no longer has to wait every iteration for the serial to timeout and the data syncer script had to be tweaked to not run as fast as possible. It syncs the full state once per second. As for the PID loop, it now runs at a fixed 10 hertz, which for the given application is more than enough.
Well, this is it for now. Stay safe.